RTK-GNSS用基準局データの配信(2周波)
配信再開のお知らせ2025年4月14日より配信再開しました。故障によりアンテナを交換し、JC Antenna JCA228Fになりました。
2018年4月より,鳥取大学湖山キャンパスに設置しているRTK-GNSS用基準局データの常時配信を行っています. 対応する受信機と本配信データを同時に利用することで,鳥取大学湖山キャンパスを中心とするおおよそ半径10 km 圏内でセンチメートル精度の地上位置をリアルタイムに計測可能となります. 基準局の有効範囲内には,鳥取砂丘をはじめ白兎海岸,湖山池といった観光地や,鳥取市街地の大部分が含まれています.
配信システムの詳細
サーバアドレス:gnss.mp.tottori-u.ac.jp
配信プロトコル:Ntrip
配信ポート:80
マウントポイント:TTRU-RTCM3
配信形式:RTCM_V3 (1005, 1077, 1087, 1097, 1127, 1230)
更新頻度:1 Hz
認証ユーザ名/パスワード:なし/なし
対応衛星システム:GPS(米国),GLONASS(ロシア),Galileo(EU),BeiDou(中国)
マウントポイント:TTRU-RAW
配信形式:UBX-RXM-RAWX,UBX-RXM-SFRBX
更新頻度:1 Hz
認証ユーザ名/パスワード:なし/なし
対応衛星システム:GPS(米国),GLONASS(ロシア),Galileo(EU),QZSS(日本),BeiDou(中国)
配信プロトコル:Ntrip
配信ポート:80
マウントポイント:TTRU-RTCM3
配信形式:RTCM_V3 (1005, 1077, 1087, 1097, 1127, 1230)
更新頻度:1 Hz
認証ユーザ名/パスワード:なし/なし
対応衛星システム:GPS(米国),GLONASS(ロシア),Galileo(EU),BeiDou(中国)
マウントポイント:TTRU-RAW
配信形式:UBX-RXM-RAWX,UBX-RXM-SFRBX
更新頻度:1 Hz
認証ユーザ名/パスワード:なし/なし
対応衛星システム:GPS(米国),GLONASS(ロシア),Galileo(EU),QZSS(日本),BeiDou(中国)
ublox社製ZED-F9Pによる2周波配信.アンテナはJC Antenna社製JCA228Fを利用
基準局の詳細
基準局の詳細は以下の通りです.
設置場所:鳥取大学湖山キャンパス (鳥取市湖山町南4丁目101番地) 工学部機械棟屋上
座標位置:北緯35.51626651 度,東経134.17209955 度,楕円体高:66.262 m
設置場所:鳥取大学湖山キャンパス (鳥取市湖山町南4丁目101番地) 工学部機械棟屋上
座標位置:北緯35.51626651 度,東経134.17209955 度,楕円体高:66.262 m
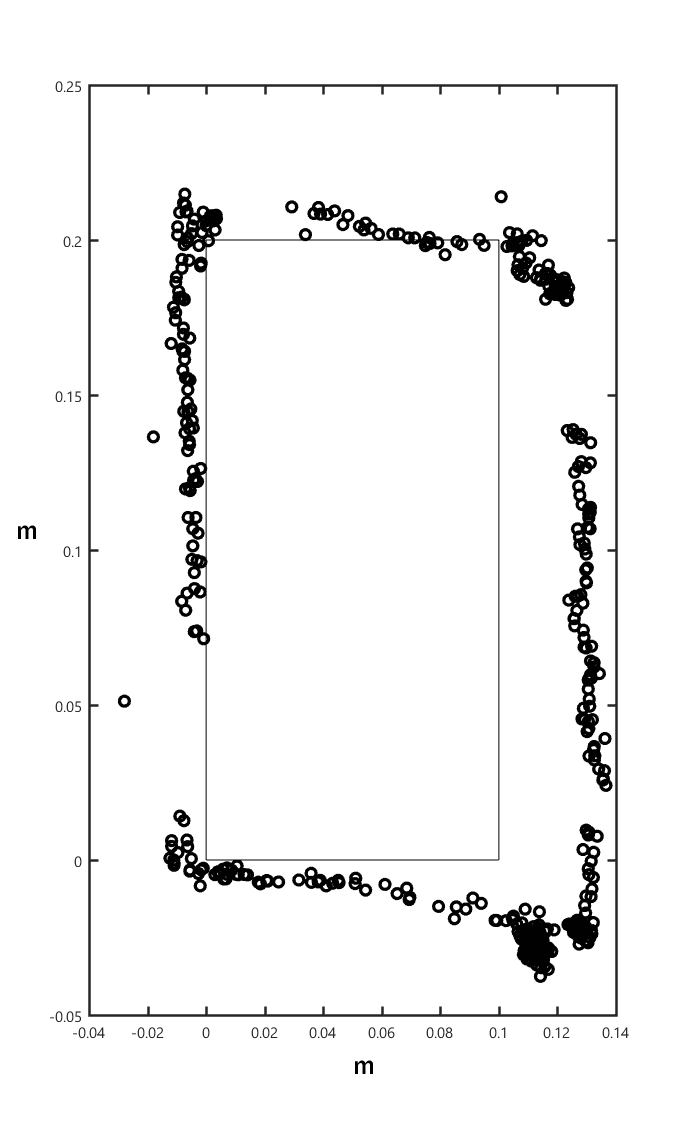
電子基準点鳥取(基線長約2.6km)を使用し,2019年2月26日0時-27日0時のデータを利用したRTKPOSTによる後処理基線解析結果.基準局位置のジオイド高は35.7799 m.




参考サイト
連絡先
中谷までメールでお知らせください.
(アドレスはメンバー欄にあります.)
(アドレスはメンバー欄にあります.)